
|
|
|
|
|
|
|
|
|
|
|
|
|
|
 |
| Exploration in Gibson (Val) | Exploration in MP3D (Domain Generalization) |
| PointGoal in Gibson (Val) | PointGoal in MP3D (Domain Generalization) |
| PointGoal in Gibson Hard-GEDR (Goal Generalization) | PointGoal in Gibson Hard-Dist (Goal Generalization) |
 |

|

|

|
| [GitHub] |

|
Citation
@inproceedings{chaplot2020learning,
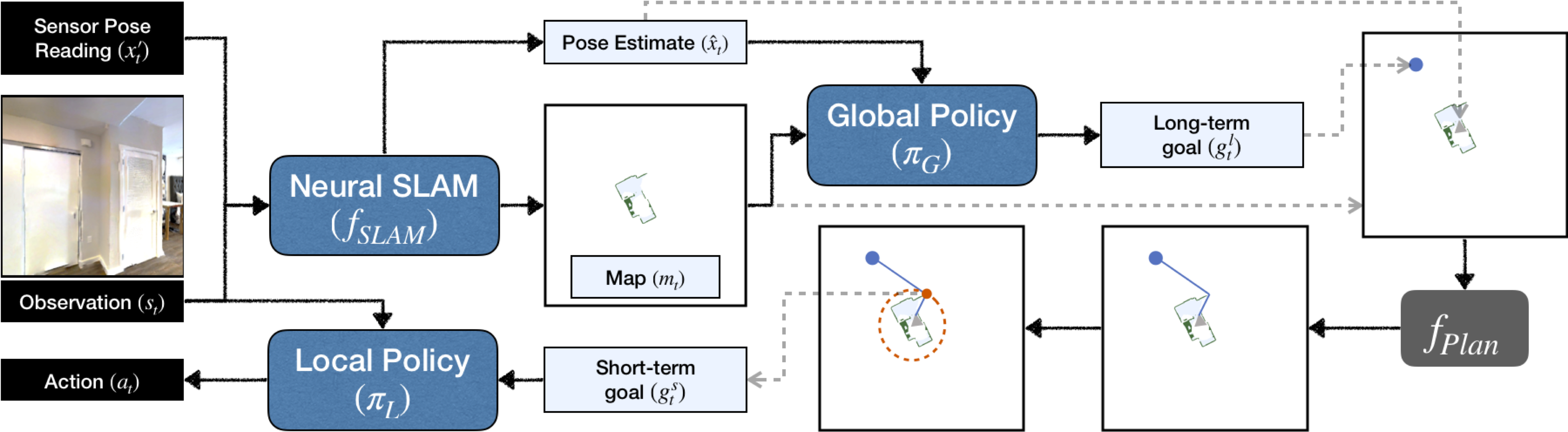
title={Learning To Explore Using Active Neural SLAM},
author={Chaplot, Devendra Singh and Gandhi, Dhiraj and Gupta,
Saurabh and Gupta, Abhinav and Salakhutdinov, Ruslan},
booktitle={International Conference on
Learning Representations (ICLR)},
year={2020}}
|
|
Semantic Exploration
 |
Neural Topological SLAM
 |
Semantic Curiosity
 |
Acknowledgements |